
Finite Element Analysis
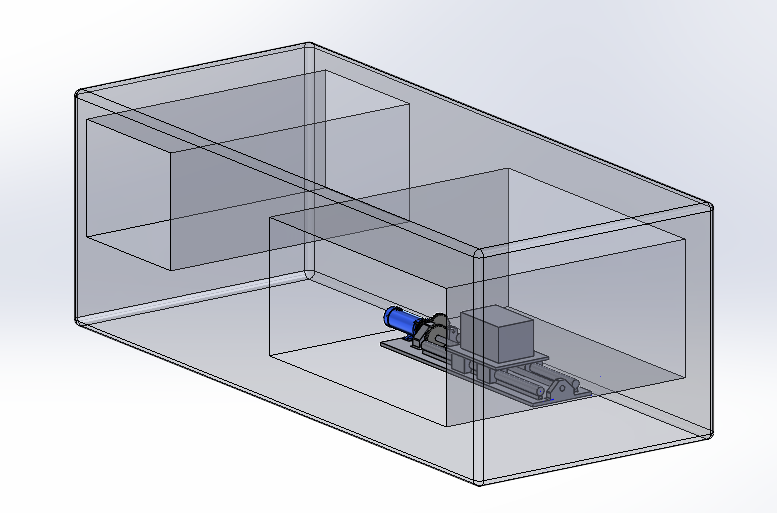
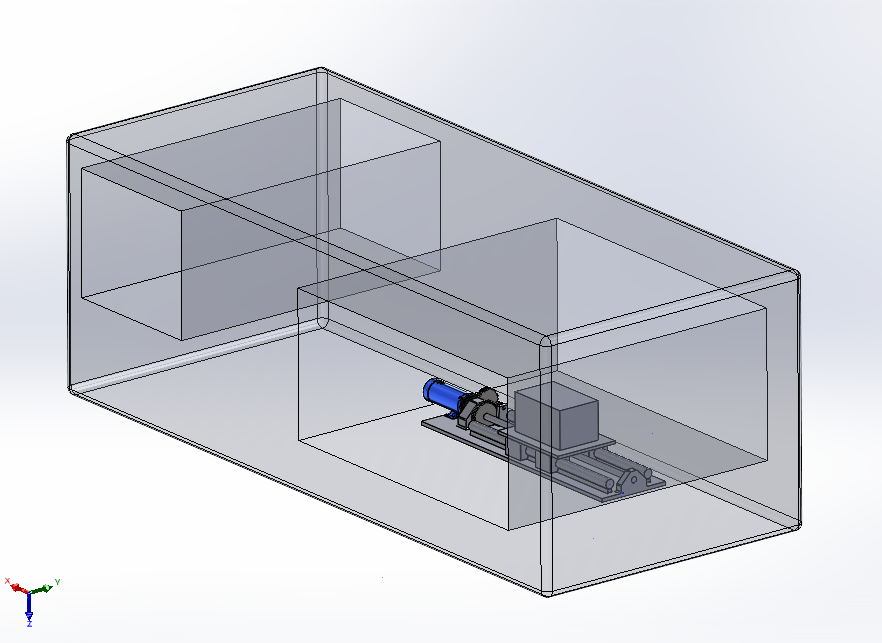
I designed and analyzed an electromechanical trim weight system for an autonomous underwater vehicle (AUV) as a part of a team for my MECH 350 (Mechanical Elements) final project. Inspired by the Aquanaut MK2 AUV by Nauticus Robotics, this project focused on improving an active pitch system by replacing a dedicated trim mass with the vehicle’s existing 920 kg battery sled. By translating the battery sled forward or backward inside the vehicle, the system shifts the center of mass and helps control the vehicle’s pitch attitude. My work focused on SolidWorks modeling, finite element analysis, gear sizing, ball screw shaft analysis, material selection, and structural validation of the drivetrain and support system.
Results
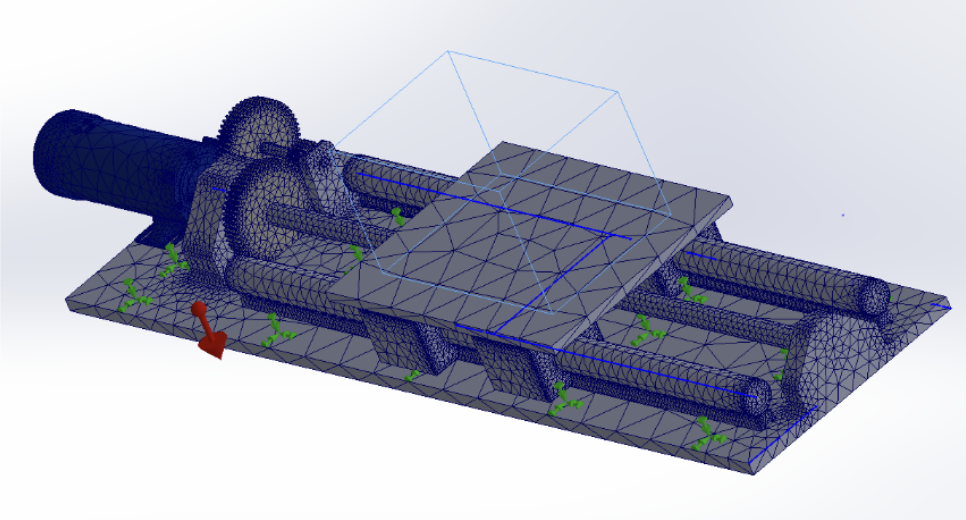
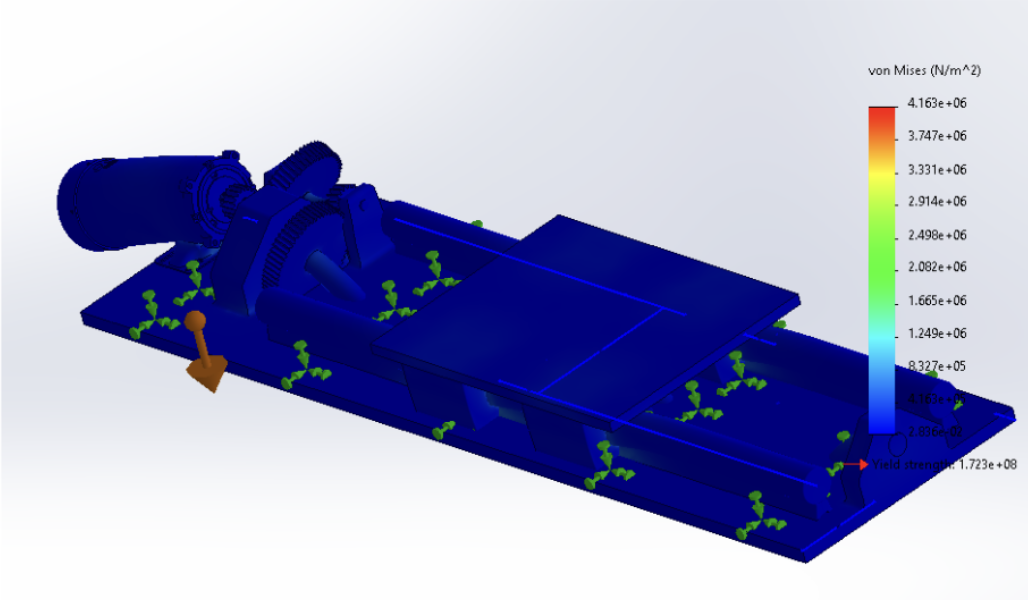
I used SolidWorks Simulation to validate the structural behavior of the Active Pitch System assembly under static loading. The battery was modeled as a remote mass, allowing the simulation to approximate how the system would respond to the weight of the battery without fully modeling every detail of the battery structure. The study predicted a maximum von Mises stress of 4.163 MPa and a maximum resultant displacement of 2.642 × 10⁻³ mm, giving an approximate static yield factor of safety of 41.4 for the simplified global model.
The FEA results suggests that the assembly is globally stiff under the applied loading conditions, with the highest stresses remaining well below the material yield strength. It is important to note that the deformed shape plots are visually exaggerated by SolidWorks for clarity. The deformation scale factor was approximately 76,996, so the bending shown in the post-processed images should not be interpreted as the real physical deformation of the APS. The actual displacement was only on the order of micrometers.
Project Overview
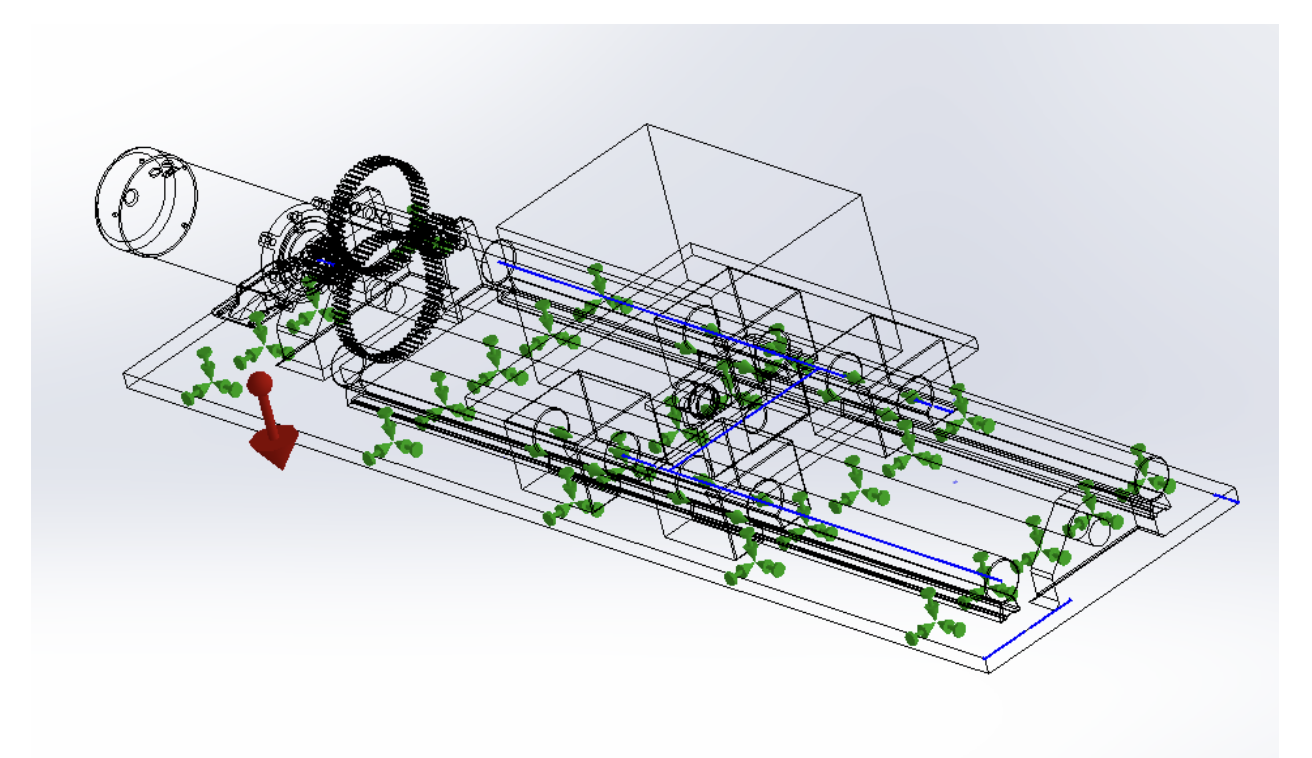
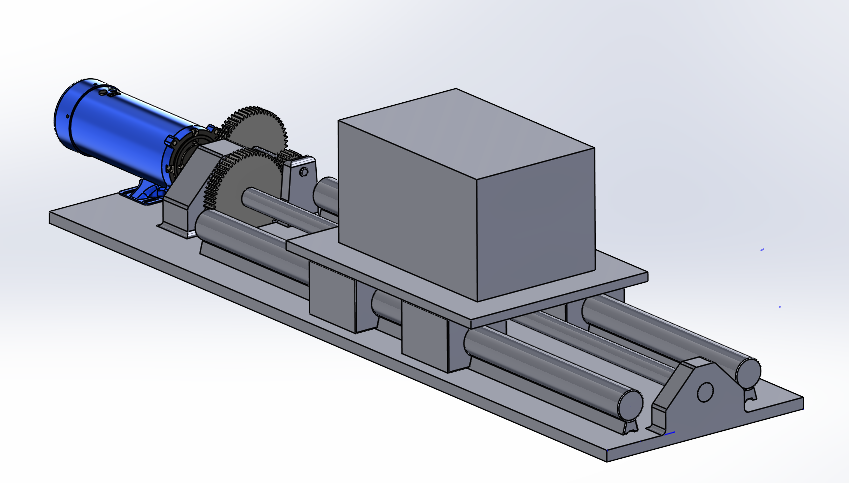
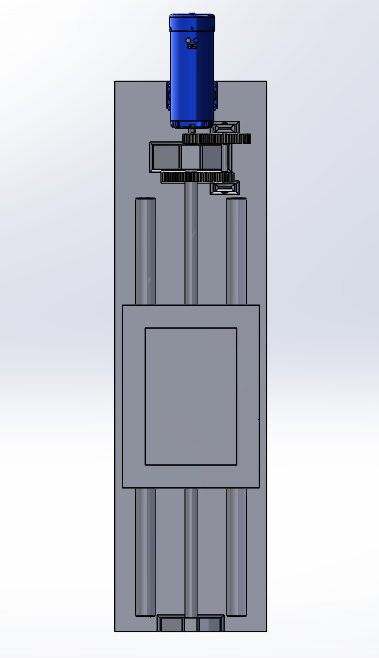
After evaluating different design concepts, our team selected a central ball screw and dual-guide-rail carriage system because it provided controlled linear motion, strong support for the battery sled, and a compact layout within the vehicle envelope. The final design used a central ball screw, dual guide rails, a two-stage spur gearbox, and a fail-safe holding mechanism to move a 920 kg battery sled along the vehicle’s longitudinal axis. The system was designed to achieve a ±20° pitch range, complete the transition within 15 seconds, survive launch and recovery shock loading, and operate over a 7-year commercial life in a free-flooded saltwater environment.
My Role
More specifically, my work included:
Creating the simplified SolidWorks assembly model of the APS mechanism.
Running SolidWorks FEA to evaluate global stress, displacement, and strain.
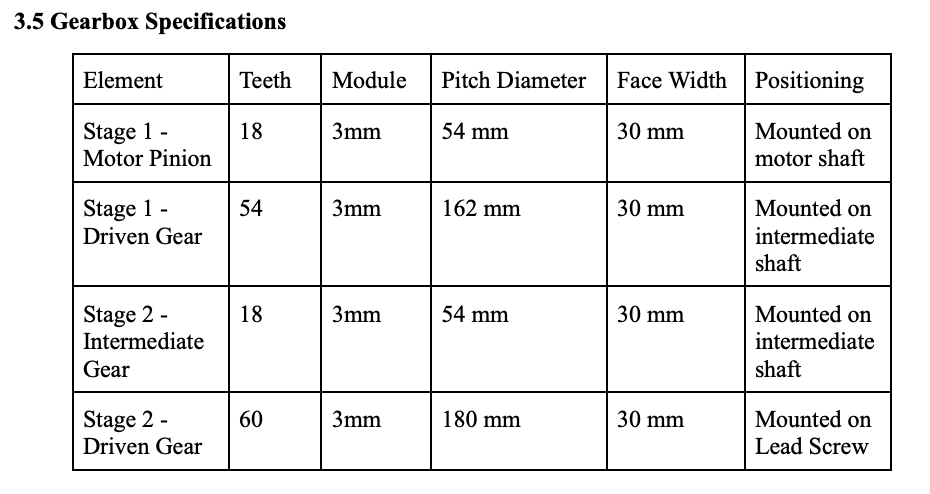
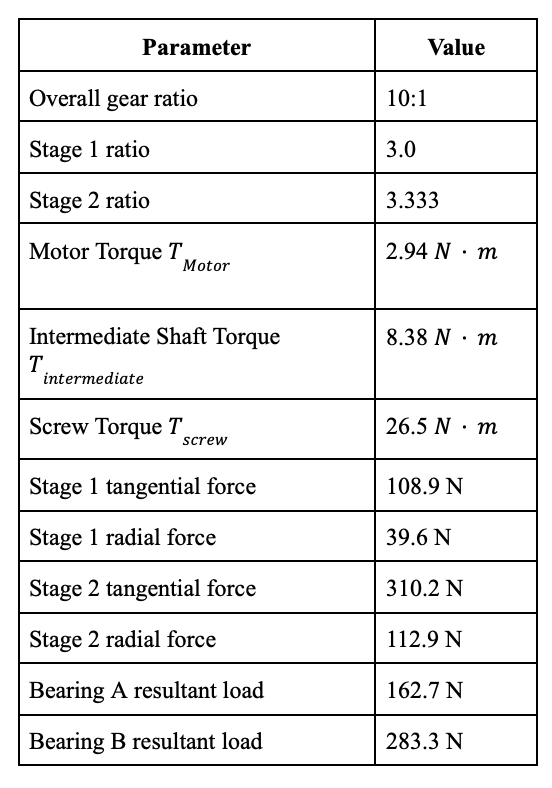
Performing gear analysis for the two-stage spur gearbox.
Analyzing the intermediate shaft under combined bending and torsion.
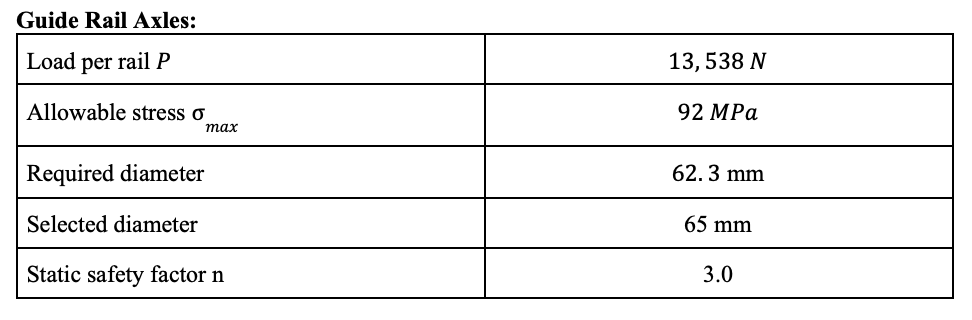
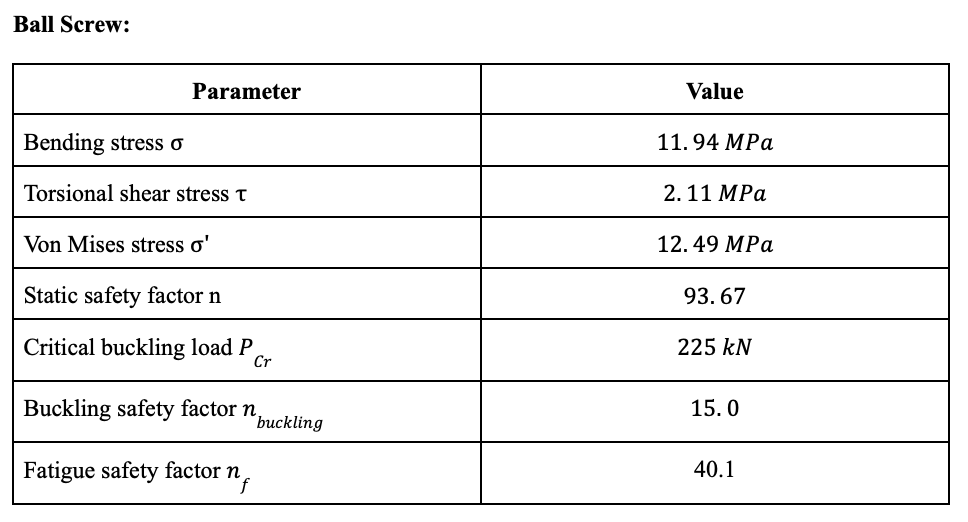
Evaluating ball screw shaft loading, buckling, and fatigue behavior.
Calculating bearing reactions and bearing life requirements.
Von Mises Stress Graph

Displacement Graph
This project was a valuable experiences in connecting mechanical analysis to a full system-level design. Instead of only solving for one component, I had to think through how the gearbox, shafts, bearings, rails, support structure, material choices, and packaging constraints all affected each other. It strengthened my knowledge of industrial design standards (Thank you Shigley’s), part/material sourcing, SolidWorks modeling, and gave me some simple but important FEA experience.
The biggest challenge was making design decisions that were realistic for an underwater vehicle environment. Many choices were driven not just by stress limits, but also by support conditions, bearing interfaces, corrosion resistance, manufacturability, and space constraints. This project helped me build a stronger ability to make engineering decisions in drivetrain design, structural validation, simulation interpretation, all which are skills that directly apply to mechanical design, robotics, automation, and electromechanical systems.
AUV Trim Weight System Design and Analysis


Strain Graph
Takeaways
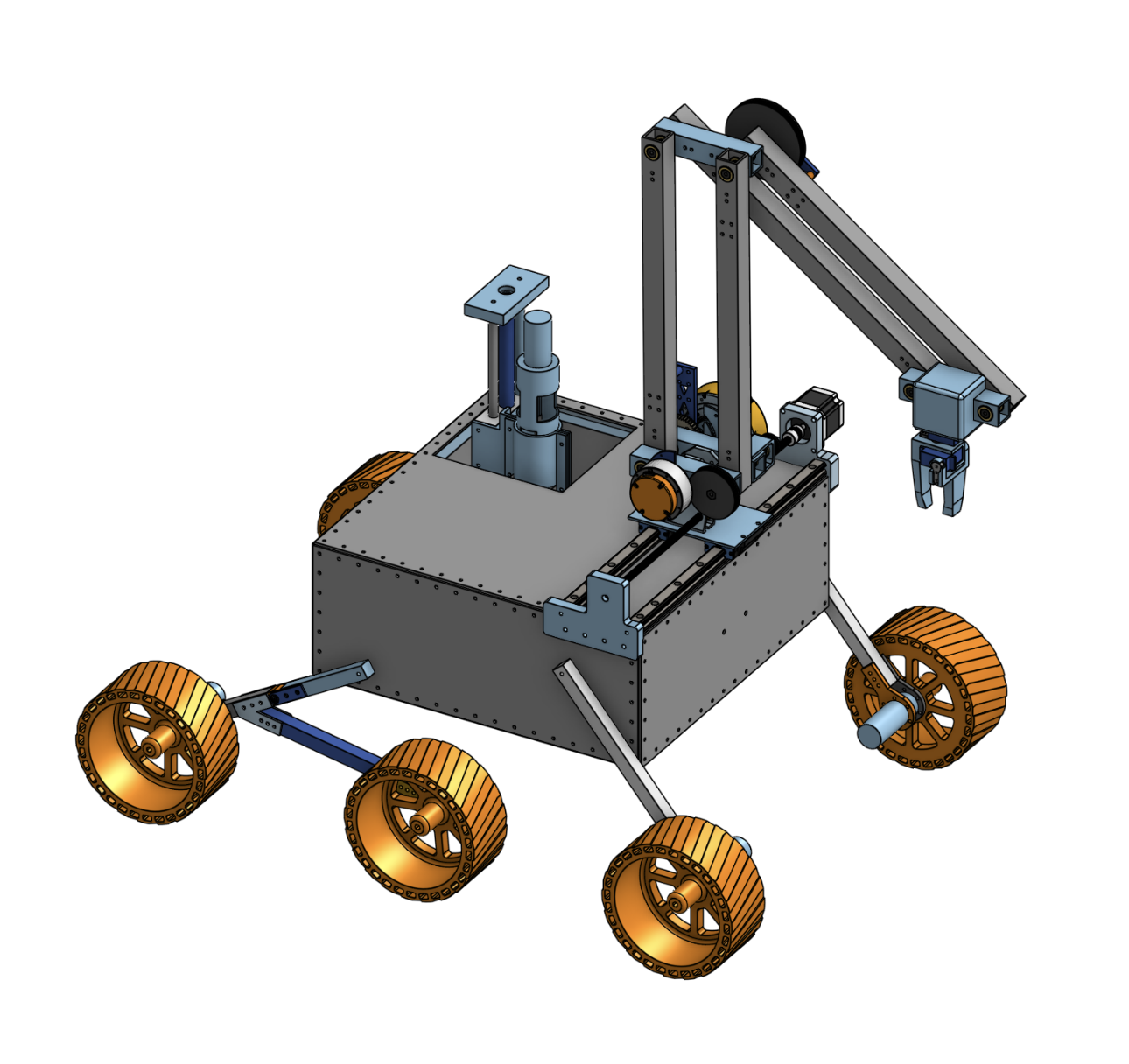
Rice Robotics Club - University Rover Challenge
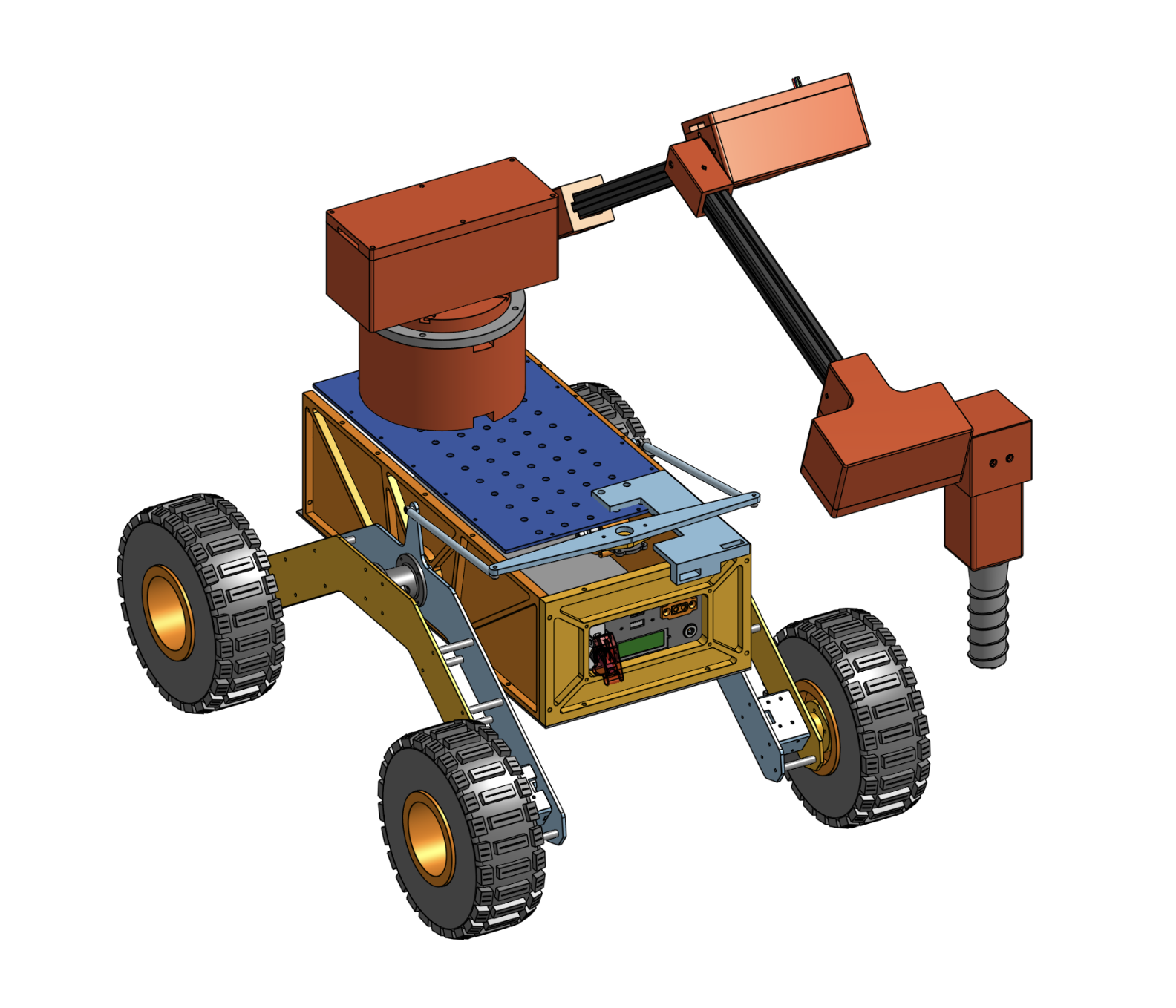
Rice Robotics Club - Lunar Rover
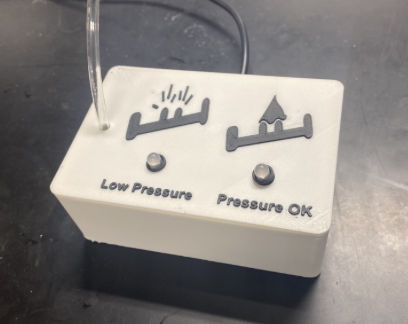
Bubble CPAP Monitoring for Neonates
AUV Trim Weight System Design and Analysis
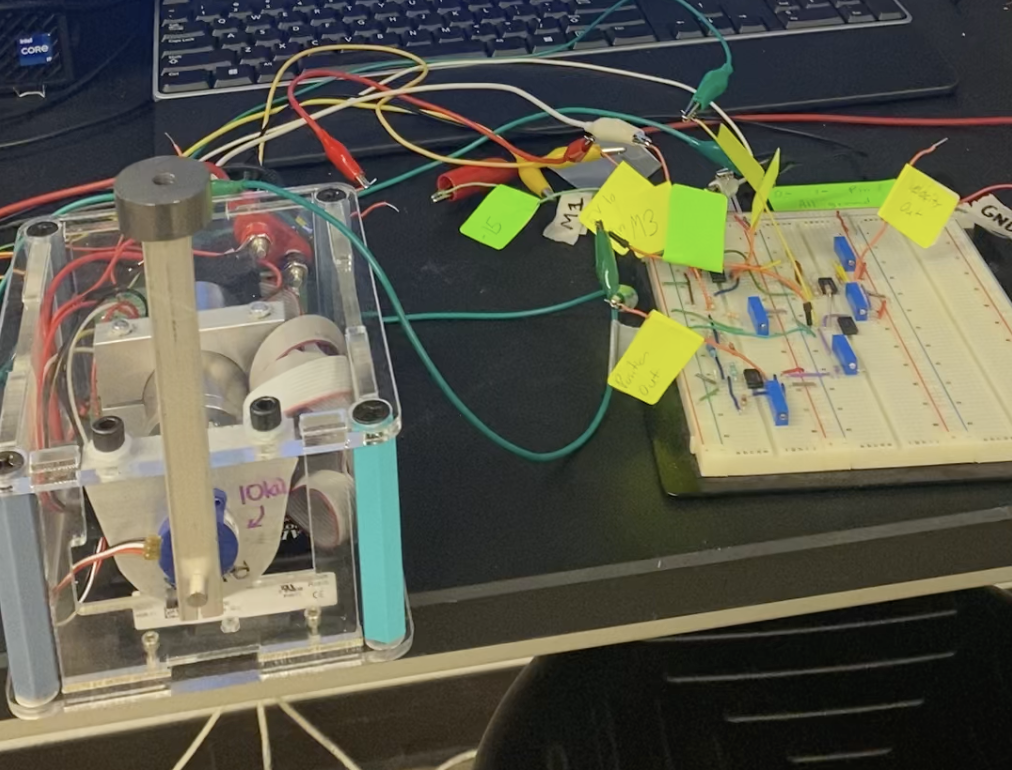
Analog and Digital Control of an Inverted Pendulum
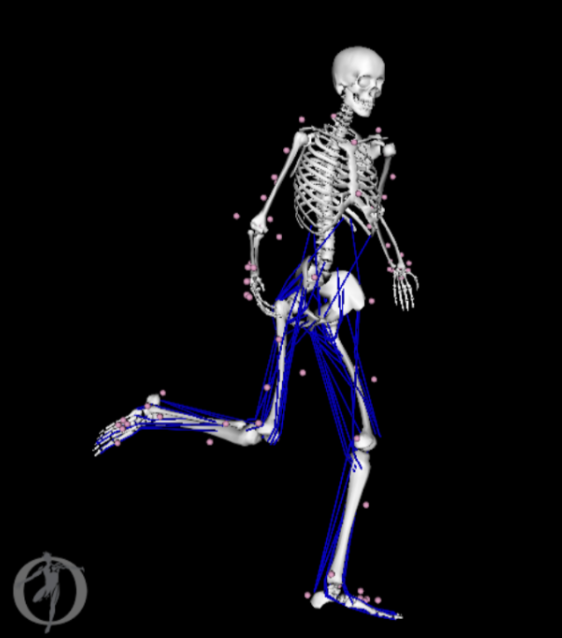
Multi-body Dynamics Simulation of a Soccer Kick

Chess GPT: The Self Playing Chessboard
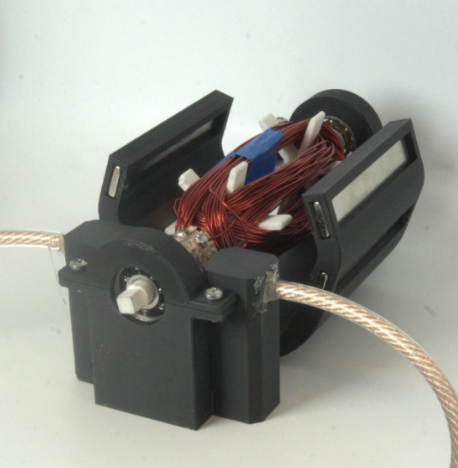
Custom DC Motor