
SUMMARY
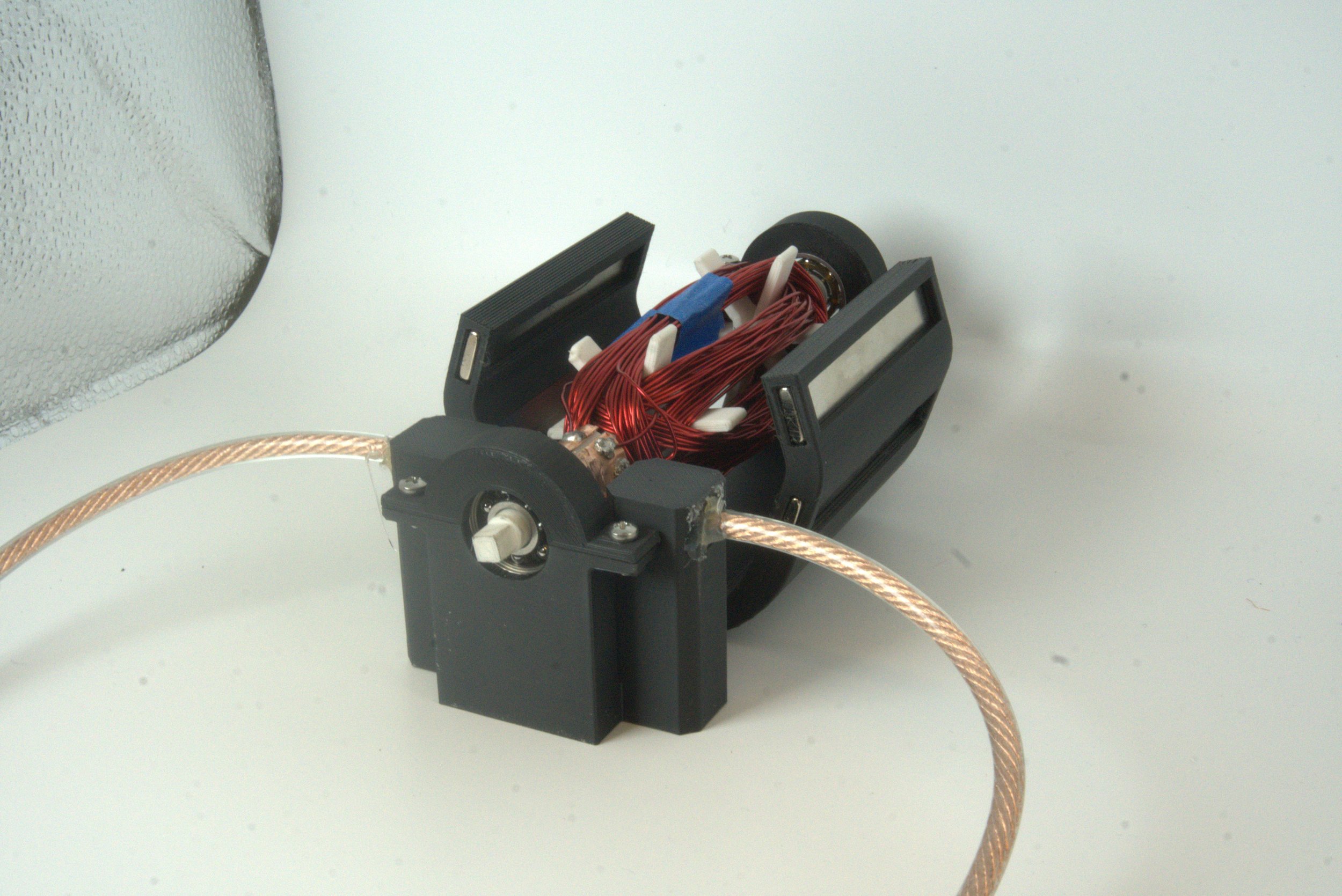
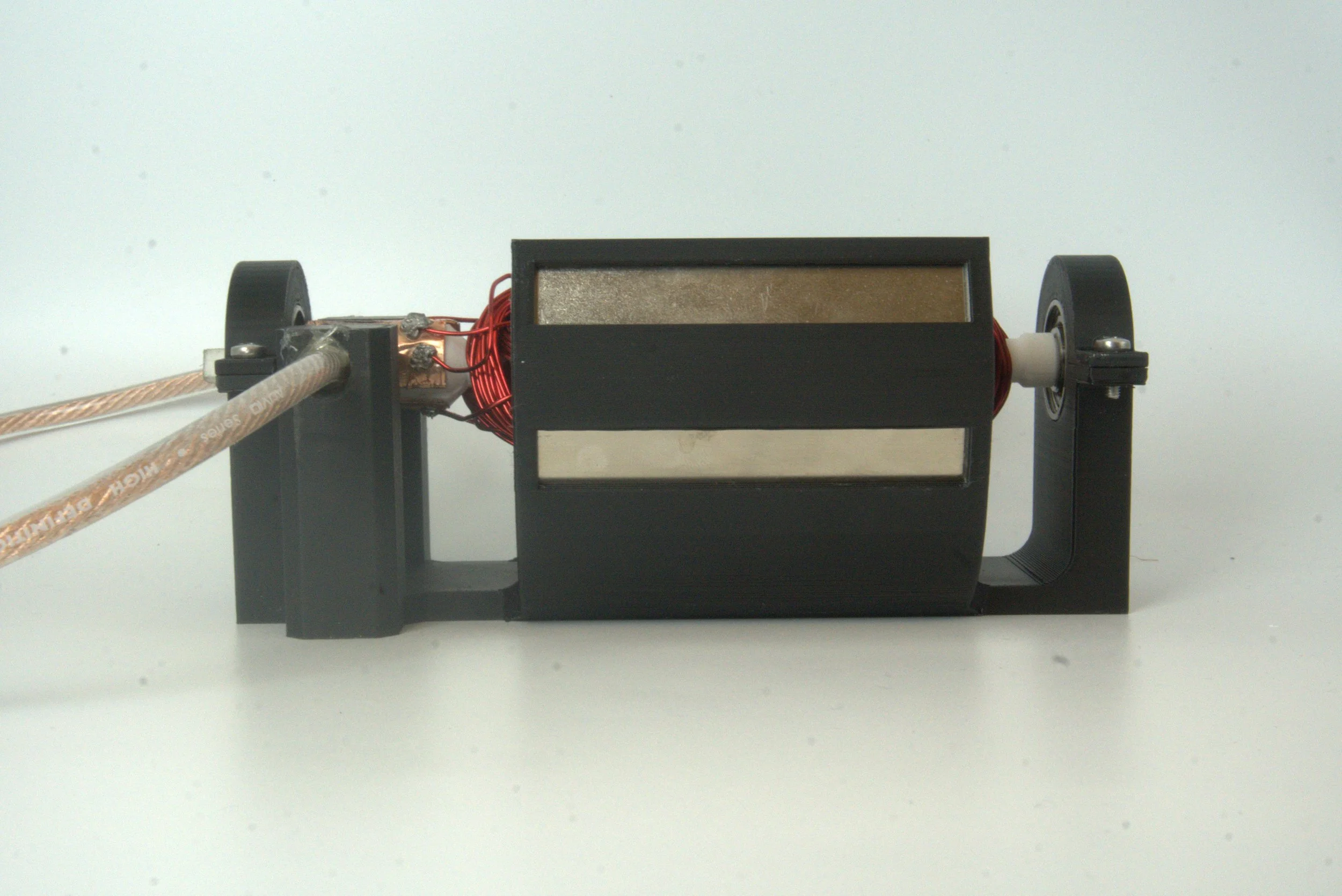
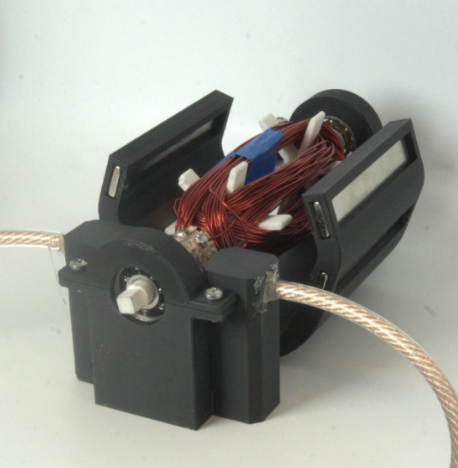
This was the first team project in my Spring 2026 mechatronics course, where we designed, fabricated, and tested a homemade DC motor. The goal of the project was to understand motor operation through a hands-on build involving an armature, commutator, brushes, magnet holders, and a custom support structure.
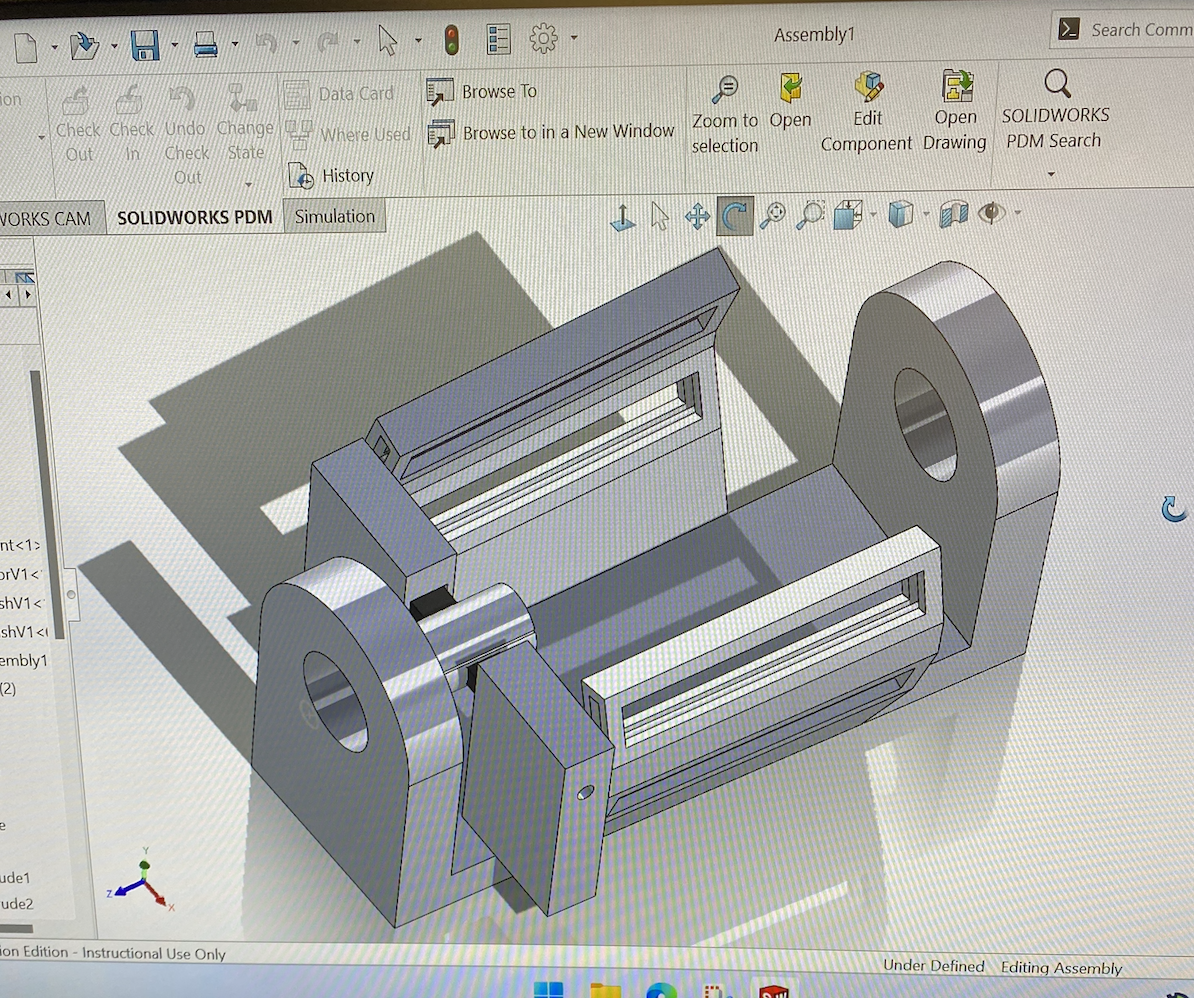
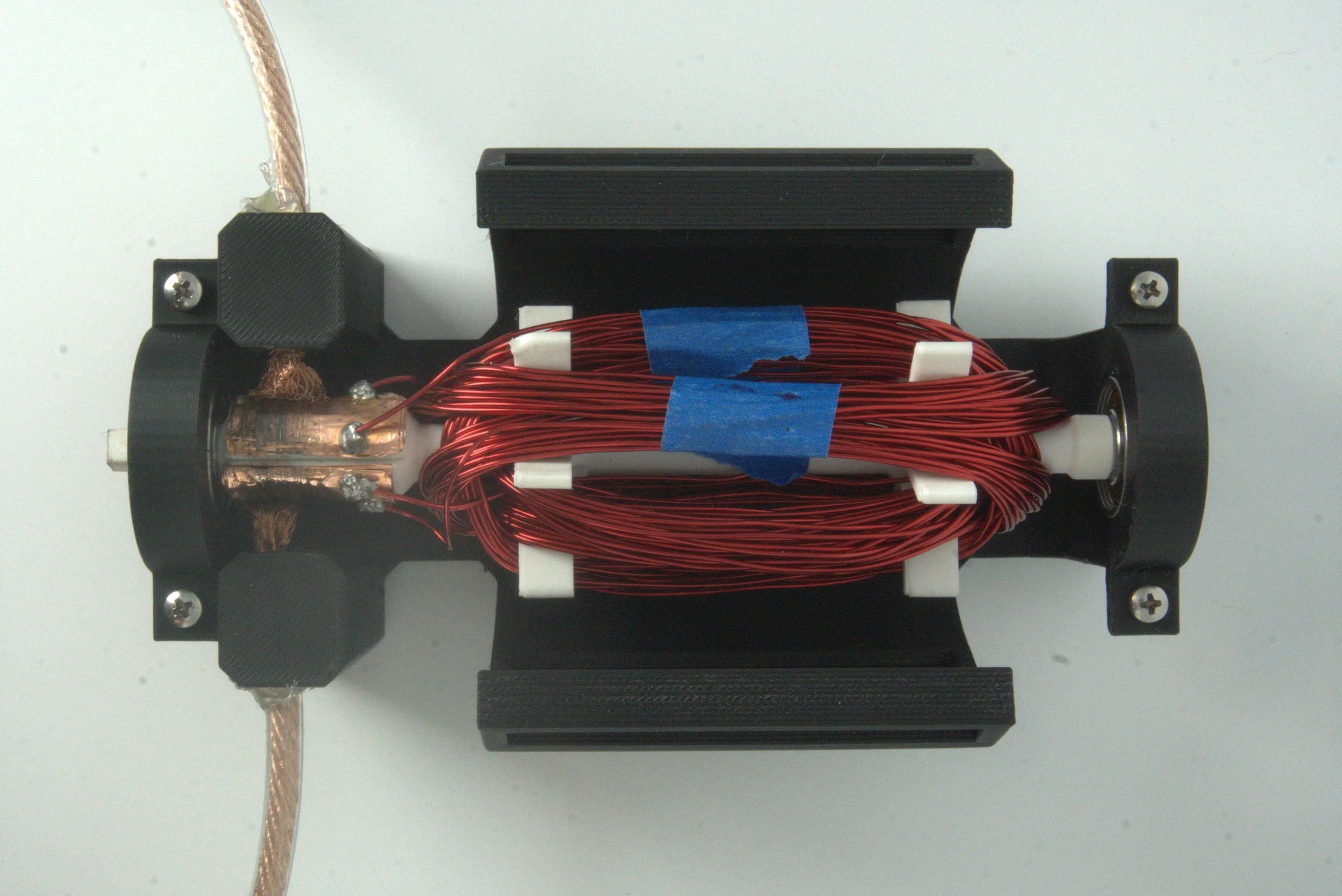
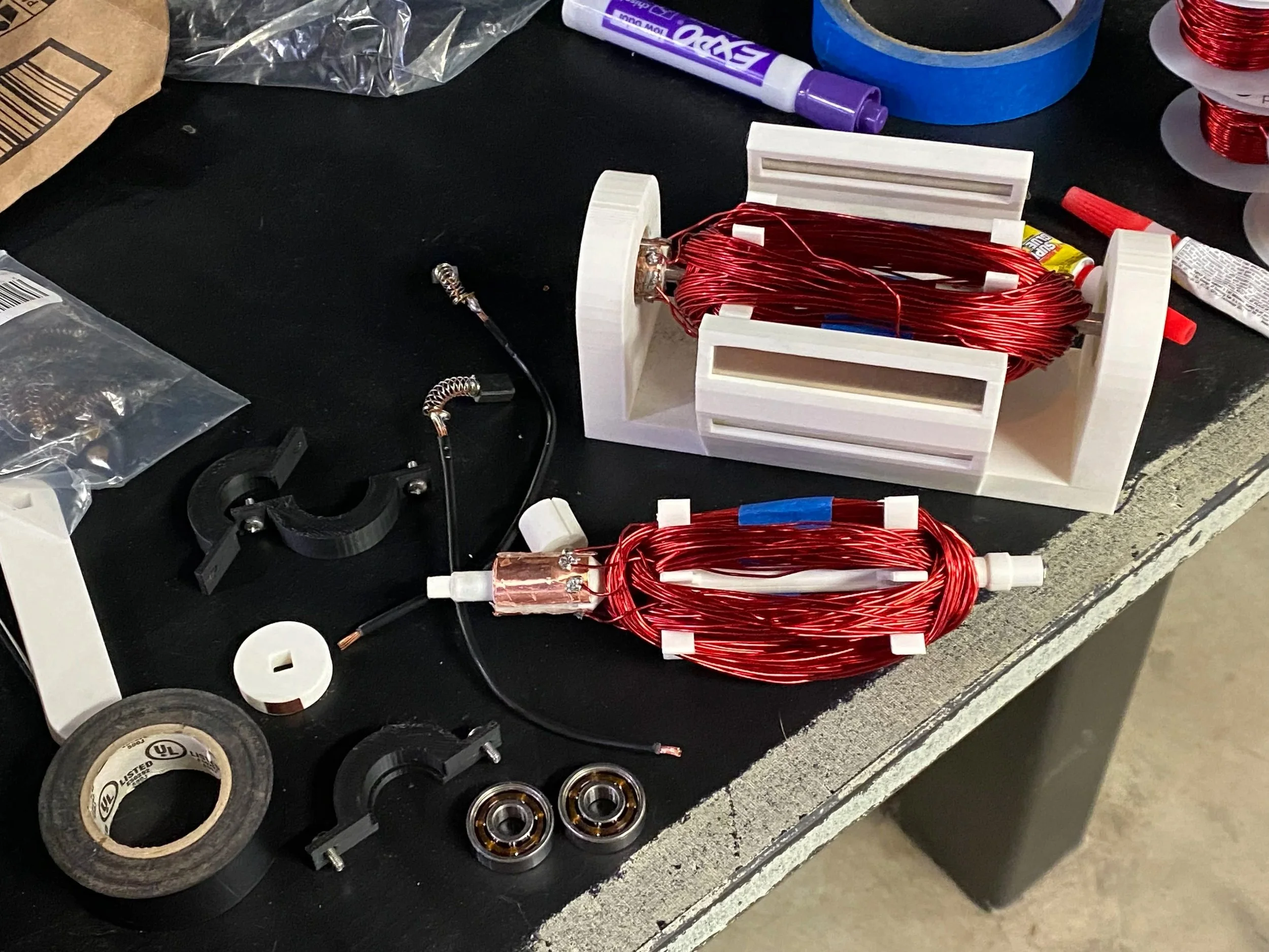
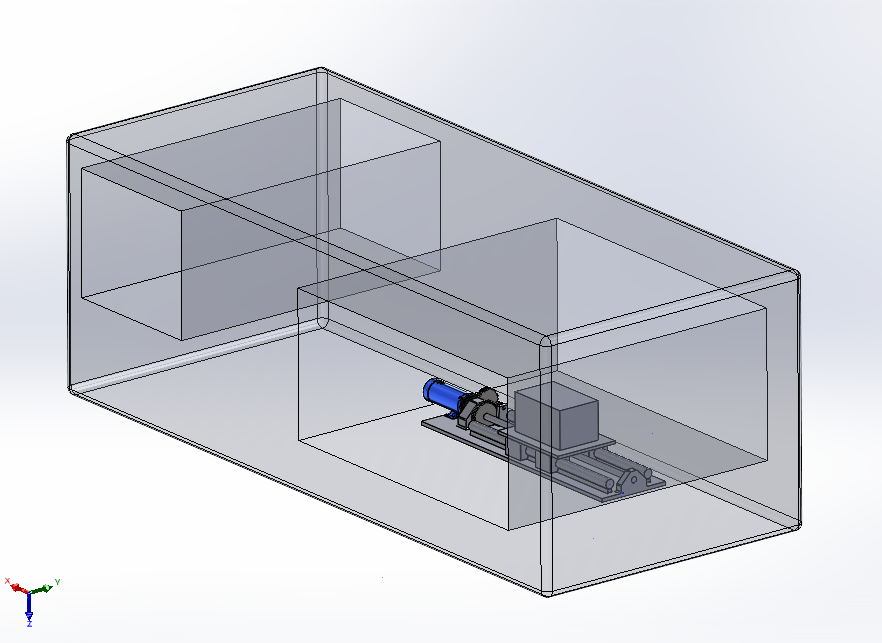
For my individual contribution, I designed, prototyped, tested, and fabricated the motor’s commutator, brushes, and brush holder. I also created the full motor assembly in SolidWorks to check how the components would move, fit together, and integrate before final fabrication. During testing, I helped document the motor’s performance through photos, videos, measurements, and the final report.
As a team, we used a series-wound armature, alternate magnet placement, and exchangeable attachments for measuring either speed or torque. We also angled the magnet holders to reduce the air gap between the magnets and rotor, increasing the magnetic field experienced by the armature. The final motor achieved a maximum speed of 5122 RPM and a measured stall torque of 0.000498 N·m.
Rice Robotics Club - University Rover Challenge
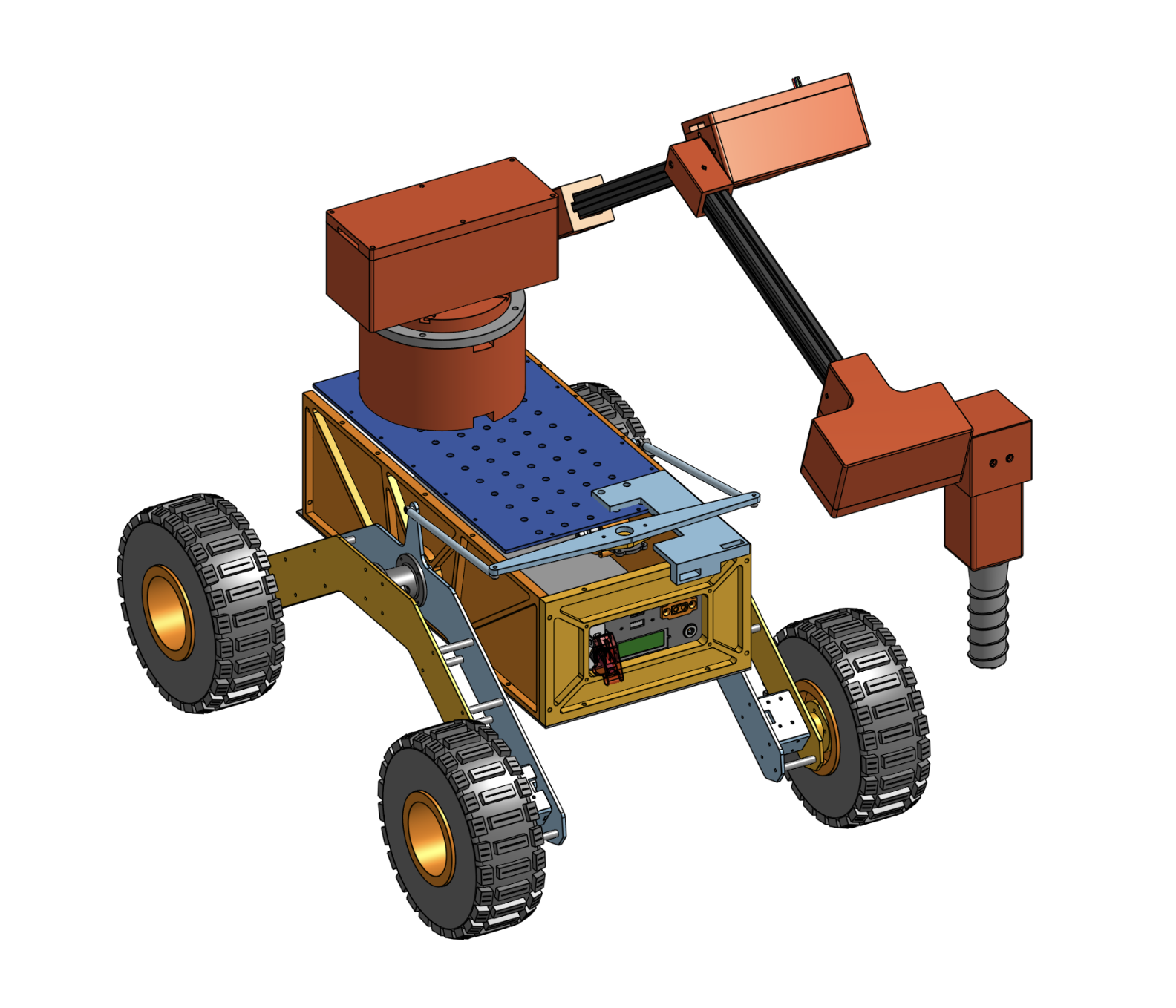
Rice Robotics Club - Lunar Rover
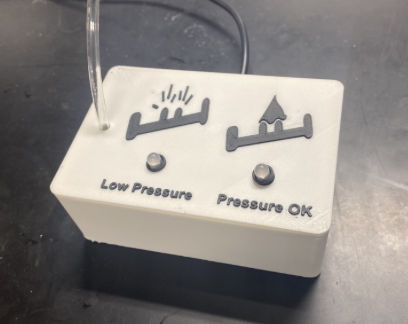
Bubble CPAP Monitoring for Neonates
AUV Trim Weight System Design and Analysis
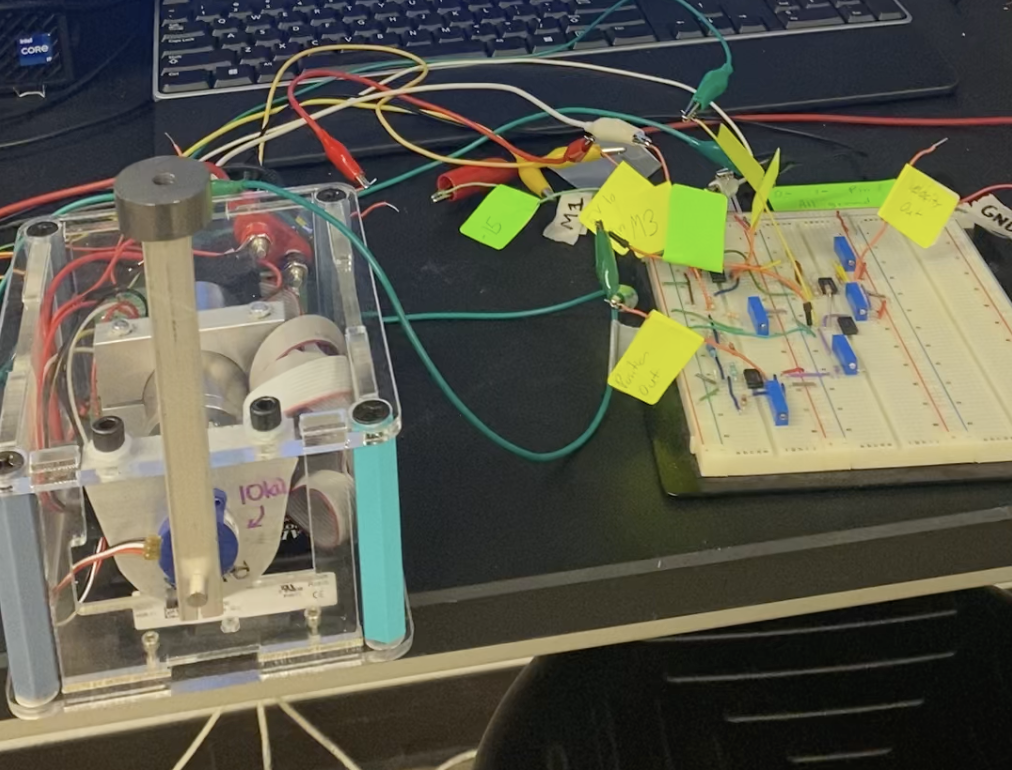
Analog and Digital Control of an Inverted Pendulum
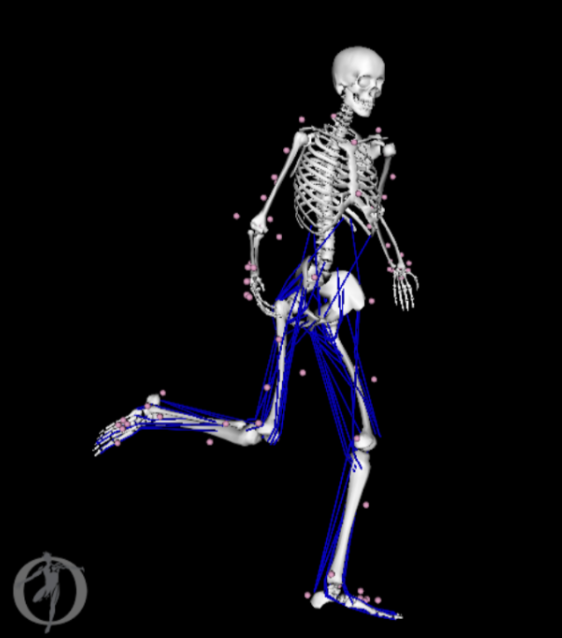
Multi-body Dynamics Simulation of a Soccer Kick

Chess GPT: The Self Playing Chessboard
Custom DC Motor